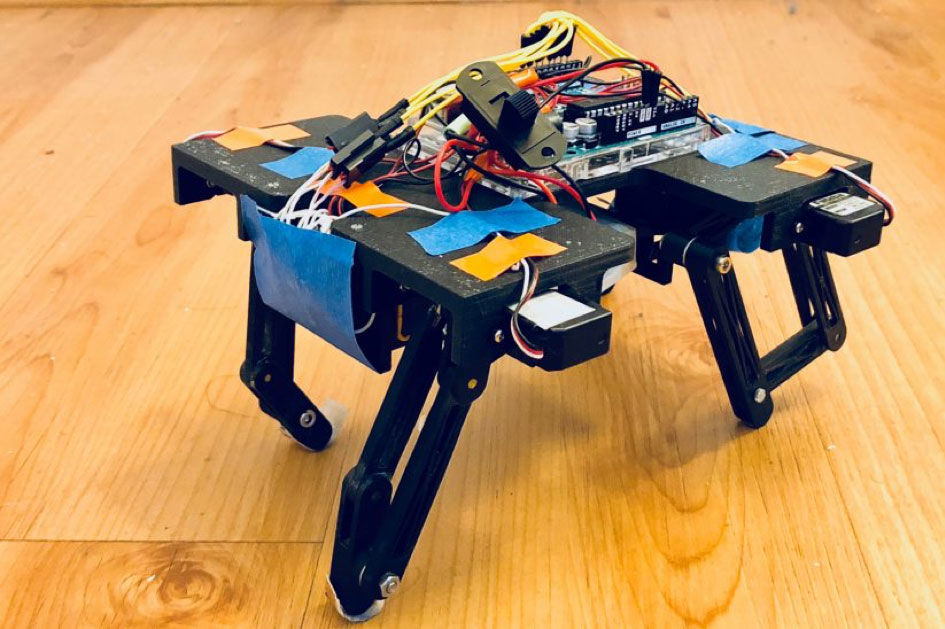
四条腿机器人,其灵感来源于猫的动作。(摄影/Daiming Yang)
如何制作仿生机器人?为什么要制作?
在大自然的启发之下,学生们发明了仿生机器人,可以提高安全性、探索灾难现场,甚至挽救生命。
从滑行和走动到飞行或游动,相对来说,动物能够更轻松地行动和与环境互动。然而,构造具有相同能力的机器人要困难得多。
Satyandra“S.K.”Gupta说道:“机器人专家们在自然界中观察动物时都忍不住心生嫉妒。”他担任南加州大学Viterbi工程学院机械工程史密斯国际教授职位。
“从大自然中汲取灵感为打造新型机器人提供了新的可能性。因此,仿生机器人已成为了机器人领域的一个重要的专业化领域,” 航空航天与机械工程系副主任,兼先进制造中心主任Gupta说道。

通过模仿自然动作,这些类生物机器人可前往传统机器人无法到达的地方,如灾难现场的险要地带。它们可用于挽救生命、提高安全性或探索偏远地区。此外,调节生物属性可让机器人更强壮或更节能。
仿生机器人:各种新的可能性
在Gupta教授的《仿生机器人》本科课程中,学生们从大自然寻找机器人设计的各种新可能性。在了解了传统机器人的基本原理和仿生设计的作用之后,学生们需要根据动物动作来构造和编程他们自己的机器人。
Daiming Yang、Chenchen Huang和Shijing Lu选择构建四条腿的机器人,模仿了猫的动作。
Yang说,与狗和马不同,猫行走时前腿是向前弯曲而不是向后弯曲,这可能会在机器人运动分析中产生“奇异性”。

另一个团队选择构造像螃蟹一样横行的机器人。
Pamela Denny(团队成员包括Mary Bessell和Yan Zhang)说道:“我们的团队试图捕获螃蟹缓慢行走时所产生的被动稳态动力学[一系列下落]。最困难的任务在于机器人的组装,消除关节的摩擦。这需要很细致的工作,也很复杂,因为有12个关节需要设置、对齐和调整。”
4月下旬,9个团队向班级展示了他们的项目成果,并演示了其各自机器人的独特之处。行走、爬行或侧步,每个机器人都沿着一条为其身体长度30倍的轨道前进,标志着学生们一个学期的努力取得了成功。
Denny说道:“我们的团队很高兴能够创造一只真正有用的螃蟹。确实很有趣,我强烈推荐这门课。”